Feiyu Zhao
I am a Master’s student in Computer Science at ShanghaiTech University and a member of the ShanghaiTech Automation and Robotics (STAR) Center, advised by Prof. Chenxi Xiao. My research focuses on robotic perception and manipulation with tactile sensing, including active contact-based exploration and 3D shape reconstruction for precise measurement and dexterous manipulation.
Seeking Research Intern Opportunities starting Mar. 2026.
Email: zhaofy12024 [AT] shanghaitech.edu.cn
Github
Google Scholar

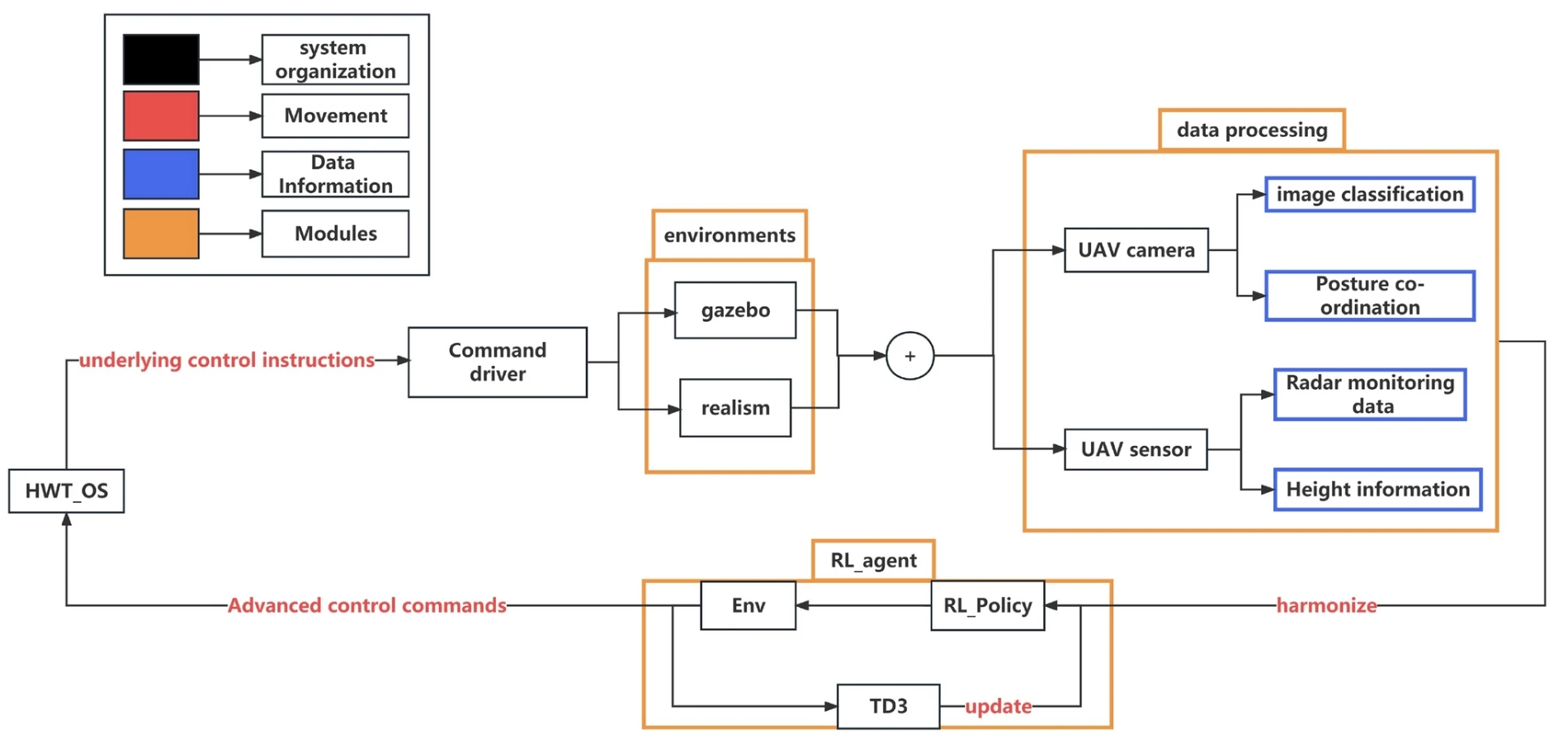
Autonomous localized path planning algorithm for UAVs based on TD3 strategy
Feiyu Zhao, Li Dayan*, Wang Zhengxu, Mao Jianlin, Wang Niya
Scientific Reports
PDF
2024
Award, The Third Prize in 2024 ManiSkill ViTac Challenge, CVPR & ICRA Workshop2023
Award, The First Prize in the National University Computer Design Competition - Internet of Things Special Category2023
Award, The Second Prize in the China National University Intelligent Vehicle Competition - Intelligent Warehousing2023
Award, The Second Prize in the National University Computer Design Competition - Artificial Intelligence Challenge2023
Award, The Second Prize in the China National University Intelligent Robot Innovation Competition2023
Award, The Third Prize in the China National University Intelligent Vehicle Competition - Aerospace Logistics2022
Award, The First Prize in the RoboCom - Robot Developers Contest